Motion dynamic control for Mobile Robot's Trajectory Thisara Pathirana 3:04 4 years ago 54 Далее Скачать
Trajectory generation with n-via points for a mobile robot Santhakumar Mohan 19:52 3 years ago 2 463 Далее Скачать
Demystifying Autonomous Mobile Robotics by Dhruva Shaw The Vigyan Chronicles 59:44 1 day ago 39 Далее Скачать
Trajectory Control of an Omnidirectional Mobile Manipulator Edison R Sasig - Roboticoss 1:33 5 years ago 899 Далее Скачать
Feasible and Stressful Trajectory Generation for Mobile Robots - ISSTA 2020 Carl Hildebrandt 16:39 4 years ago 184 Далее Скачать
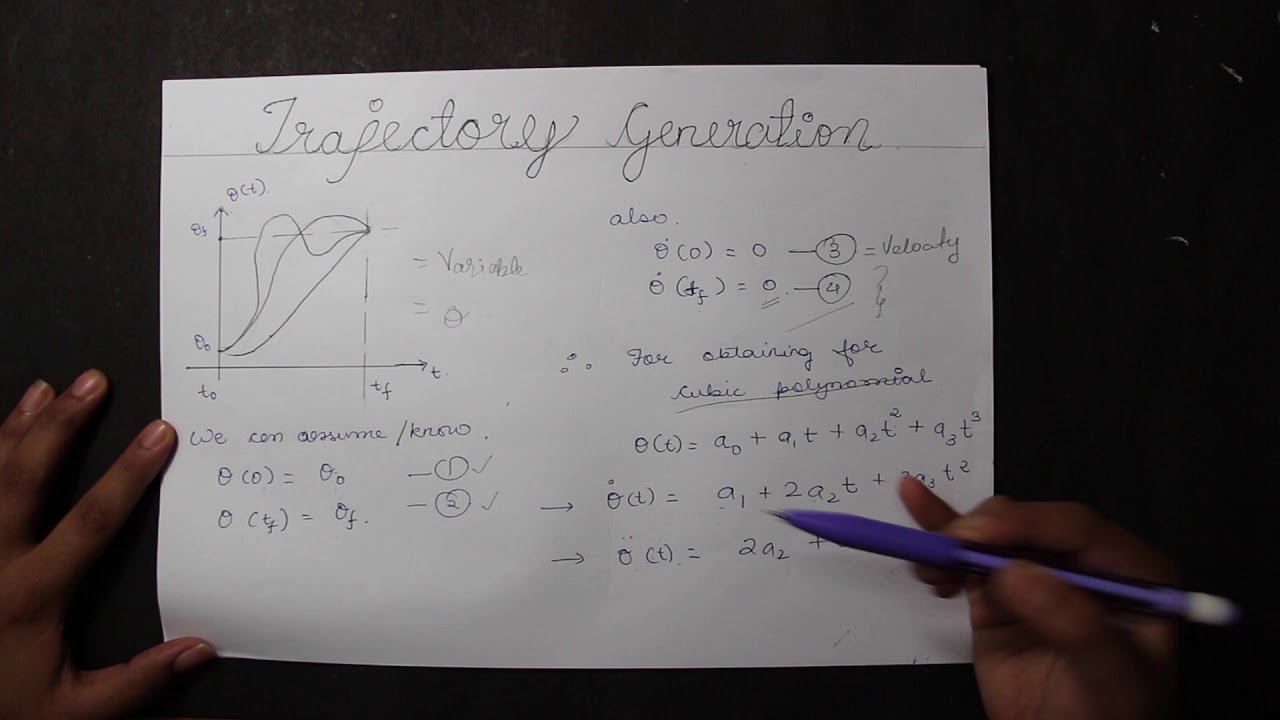
Trajectory Generation | Robotics | Mathematical Introduction to Robotics ROBOMECHTRIX 5:40 7 years ago 35 215 Далее Скачать
Trajectory Planning and Generation | Cubic Polynomials | Parabolic Blends | Robotics ThatsEngineering 21:54 3 years ago 47 407 Далее Скачать
This robot will be mass produced by 2025 #robotics #shorts Freethink 0:45 1 year ago 2 111 267 Далее Скачать
Trajectory Time Scaling of a Mobile Robot - Case 03 Chang-bae Moon 0:25 11 years ago 135 Далее Скачать
Real-Time Trajectory Adaptation for Quadrupedal Locomotion using Deep Reinforcement Learning Oxford Dynamic Robot Systems Group 3:00 3 years ago 856 Далее Скачать